网站首页生活常识 >正文
如果它像粒子一样行走,像粒子一样说话……它可能仍然不是粒子。拓扑孤子是一种特殊类型的波或位错,其行为类似于粒子:它可以四处移动,但不能像您期望的那样扩散和消失,例如池塘表面的波纹。
在《自然》杂志上发表的一项新研究中,阿姆斯特丹大学的研究人员展示了机器人超材料中拓扑孤子的非典型行为,该行为可用于控制机器人如何移动、感知周围环境和进行通信。
拓扑孤子可以在许多地方和许多不同的长度尺度上找到。例如,它们以盘绕电话线中的扭结和蛋白质等大分子的形式出现。在一个非常不同的尺度上,黑洞可以被理解为时空结构中的拓扑孤子。孤子在生物系统中发挥着重要作用,与蛋白质折叠和形态发生(细胞或器官的发育)相关。
拓扑孤子的独特特征——它们可以四处移动,但始终保持其形状并且不会突然消失——与所谓的非互易相互作用相结合时特别有趣。“在这样的互动中,代理人A对代理人B的反应与代理人B对代理人A的反应不同,”阿姆斯特丹大学博士生、新出版物的第一作者JonasVeenstra解释道。
文斯特拉继续说道:“非互惠相互作用在社会和复杂的生命系统中很常见,但长期以来一直被大多数物理学家忽视,因为它们只能存在于不平衡的系统中。通过在材料中引入非互易相互作用,我们希望模糊材料和机器之间的界限,并创造出动画或栩栩如生的材料。”
文斯特拉研究的机器材料实验室专门设计超材料:以可编程方式与环境交互的人造材料和机器人系统。大约两年前,研究小组决定研究非互易相互作用和拓扑孤子之间的相互作用,当时的学生AnahitaSarvi和ChrisVenturaMeinersen决定继续他们的理学硕士课程“研究学术技能”的研究项目。
孤子像多米诺骨牌一样移动
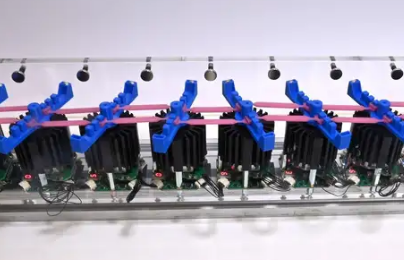
研究人员开发的孤子托管超材料由一系列旋转杆组成,这些旋转杆通过松紧带相互连接——见下图。每个杆都安装在一个小电机上,该电机根据杆相对于相邻杆的方向向杆施加很小的力。重要的是,所施加的力取决于相邻杆位于哪一侧,使得相邻杆之间的相互作用是非互易的。最后,杆上的磁铁被链条旁边放置的磁铁吸引,这样每个杆都有两个首选位置,可以向左或向右旋转。
这种超材料中的孤子是链的左旋转部分和右旋转部分相遇的位置。右旋和左旋链段之间的互补边界就是所谓的“反孤子”。这类似于老式盘绕电话线中的扭结,其中顺时针和逆时针旋转的部分会相遇。
当链条中的电机关闭时,可以在任一方向手动推动孤子和反孤子。然而,一旦电机——以及由此产生的相互作用——被打开,孤子和反孤子就会自动沿着链条滑动。它们都沿相同方向移动,其速度由电机施加的反互易性设定。
Veenstra:“许多研究都集中在通过施加外力来移动拓扑孤子。在迄今为止研究的系统中,发现孤子和反孤子自然地以相反的方向传播。但是,如果您想控制(反)孤子的行为,您可能希望将它们朝同一方向驱动。我们发现非互惠的相互作用恰恰可以实现这一点。非互易力与孤子引起的旋转成正比,因此每个孤子都会产生自己的驱动力。”
孤子的运动类似于倒下的多米诺骨牌链,每一个都推倒了相邻的一个。然而,与多米诺骨牌不同的是,非互惠的相互作用确保“倒塌”只能发生在一个方向。虽然多米诺骨牌只能倒下一次,但沿着超材料移动的孤子只是为反孤子以相同方向移动穿过它建立了链条。换句话说,任意数量的交替孤子和反孤子可以在链中移动,而无需“重置”。
运动控制
了解不可逆驱动的作用不仅有助于我们更好地理解生命系统中拓扑孤子的行为,而且还可以带来技术进步。本研究中发现的产生自驱动、单向孤子的机制可用于控制不同类型波的运动(称为波导),或赋予超材料基本的信息处理能力,例如滤波。
未来的机器人还可以使用拓扑孤子来实现基本的机器人功能,例如运动、发送信号和感知周围环境。这些功能将不再由中心点控制,而是从机器人活动部件的总和中产生。
总而言之,超材料中孤子的多米诺骨牌效应现在是实验室中一个有趣的观察结果,可能很快就会开始在工程和设计的不同分支中发挥作用。
版权说明:本站所有作品图文均由用户自行上传分享,仅供网友学习交流。若您的权利被侵害,请联系我们
相关文章:
- 2024-03-25用于大型量子计算机的新型离子阱
- 2024-03-25探索多发性硬化症病变揭示细胞结构和动力学
- 2024-03-25第一个基因工程猪肾移植到活体患者体内
- 2024-03-25汗液蛋白可能是莱姆病的防御者
- 2024-03-23摩洛哥发现鸭嘴恐龙专家解开它们如何到达那里的谜团
- 2024-03-22研究蠼螋钳子形成和母性护理的进化史
- 2024-03-22科学家研究宇宙中铈是如何产生的
- 2024-03-22科学家研究宇宙中铈是如何产生的
- 2024-03-22用抗赤霉素植物生长调节剂处理的室内绿墙植物显示出受控的茎生长
- 站长推荐
- 栏目推荐