网站首页生活常识 >正文
常见的手推木偶玩具呈动物和流行人物的形状,只需按下玩具底座底部的按钮,即可移动或折叠。现在,加州大学洛杉矶分校的一组工程师创造了一种新型可调节动态材料,可以模仿手推木偶的内部工作原理,可用于软机器人、可重构架构和空间工程。
手推木偶内部有连接绳,拉紧时,玩具会僵硬地站立。但松开这些绳子,玩具的“四肢”就会变得无力。利用控制木偶的相同绳子张力原理,研究人员开发了一种新型超材料,这种材料经过精心设计,具有具有前景的先进功能的特性。
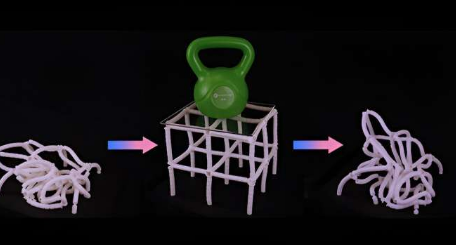
这项研究发表在《材料视界》杂志上,展示了这种新型轻质超材料,它配备了电机驱动或自驱动的绳索,这些绳索穿过互锁的锥形珠子。当被激活时,绳索被拉紧,导致珠子颗粒的嵌套链卡住并拉直成一条线,使材料变硬,同时保持其整体结构。
该研究还揭示了该材料的多功能特性,最终可用于软机器人或其他可重构结构:
绳索的张力水平可以“调整”最终结构的刚度——完全绷紧的状态可提供最强和最刚度的水平,但绳索张力的逐渐变化可使结构在保持强度的同时弯曲。关键在于嵌套锥体的精确几何形状以及它们之间的摩擦力。
采用这种设计的结构可以反复折叠和变硬,因此非常适合需要反复运动的持久设计。这种材料在未展开的柔软状态下也更易于运输和储存。
部署后,该材料表现出明显的可调性,其刚度增加了35倍以上,阻尼能力改变了50%。
这种超材料可以设计成自我驱动,通过人造肌腱触发形状,无需人工控制
“我们的超材料具有新功能,显示出将其融入机器人技术、可重构结构和空间工程的巨大潜力,”通讯作者、加州大学洛杉矶分校萨缪尔利工程学院博士后学者WenzhongYan说道。“例如,使用这种材料制造的可自行部署的软机器人可以校准其肢体的硬度以适应不同的地形,从而实现最佳运动,同时保持其身体结构。这种坚固的超材料还可以帮助机器人举起、推动或拉动物体。”
图片来源:加州大学洛杉矶分校
严教授表示:“收缩线超材料的总体概念为如何在机器人和其他设备中构建机械智能开辟了有趣的可能性。”
该论文的资深作者是加州大学洛杉矶分校电子与计算机工程系萨缪尔利副教授、嵌入式机器与无处不在的机器人实验室主任安库尔·梅塔(AnkurMehta),严是该实验室的成员之一,以及加州大学洛杉矶分校机械与航空航天工程系教授、柔性研究小组负责人乔纳森·霍普金斯(JonathanHopkins)。
据研究人员介绍,这种材料的潜在应用还包括自组装避难所,其外壳可以包裹可折叠的脚手架。它还可以用作紧凑型减震器,具有可编程的阻尼功能,适用于在恶劣环境中行驶的车辆。
“展望未来,通过改变珠子的大小和形状以及它们的连接方式,在剪裁和定制功能方面有广阔的探索空间,”梅塔说道,他同时还担任加州大学洛杉矶分校机械和航空航天工程系的教员。
虽然之前的研究已经探索了收缩线,但本文深入研究了这种系统的机械性能,包括珠子排列的理想形状、自组装以及调整以保持其整体框架的能力。
该论文的其他作者包括加州大学洛杉矶分校机械工程研究生塔尔梅奇·琼斯和瑞安·李(他们都是霍普金斯实验室的成员),以及佐治亚理工学院研究生克里斯托弗·贾维茨,他在加州大学洛杉矶分校读本科航空工程专业期间,作为霍普金斯实验室的成员参与了这项研究。
版权说明:本站所有作品图文均由用户自行上传分享,仅供网友学习交流。若您的权利被侵害,请联系我们
相关文章:
- 2024-08-14科学家们制定了一项计划来拯救淡水鳄鱼免受有毒海蟾蜍的侵害
- 2024-08-13研究人员强调紧凑城市的碳节约潜力
- 2024-08-13将石油废料升级改造成高性能且可持续的摩擦纳米发电机
- 2024-08-12研究揭示了大型系统中量子误差可消除的程度极限
- 2024-08-09用于可编程液体处理的多功能流体平台
- 2024-08-09细菌在其基因组之外编码了隐藏的基因我们呢
- 2024-08-08振动钻石的X射线图像为量子传感开辟了道路
- 2024-08-08科学家利用牙齿生长环揭示古代和现代哺乳动物生长模式的差异
- 2024-08-083D打印血管使人造器官更接近现实
- 站长推荐
- 栏目推荐