网站首页生活常识 >正文
软体充气机器人已成为需要固有安全性和适应性的应用的有前途的范例。然而,在不影响其柔软性、外形尺寸或功能的情况下,这些机器人中传感和控制系统的集成提出了重大挑战。
为了解决这一障碍,由JiyunKim教授(UNIST新材料工程系)和JonbumBae教授(UNIST机械工程系)联合领导的研究小组开发了突破性的“软阀”技术——一种一体化解决方案集成了传感器和控制阀,同时保持完全的柔软度。
传统上,软机器人身体与刚性电子元件共存以用于感知目的。该研究小组进行的研究引入了一种新颖的方法来克服这一限制,即创建无需电力即可运行的传感器和控制阀的软模拟。由此产生的管状部件具有双重功能:检测外部刺激并仅使用气压精确控制驱动运动。
通过消除对电力依赖组件的需求,这些全软阀可以在水下或火花可能造成风险的环境中安全运行,同时减轻机器人系统的重量负担。此外,每个组件的价格约为800韩元,价格低廉。
“以前的软机器人拥有灵活的身体,但依赖于硬电子部件作为刺激检测传感器和驱动控制单元,”金教授解释道。“我们的研究重点是使用软材料制造传感器和驱动控制部件。”
研究团队展示了利用这一突破性技术的各种应用。他们创造了通用钳子,能够巧妙地夹起薯片等易碎物品,防止传统刚性机器人手施加过大的力而造成破损。
此外,他们成功地利用这些全软组件开发了可穿戴肘部辅助机器人,旨在减轻重复性任务或涉及手臂运动的剧烈活动造成的肌肉负担。肘部支撑可根据个人手臂弯曲的角度自动调整,这是一项突破,使佩戴机器人时施加在肘部的压力平均减少63%。
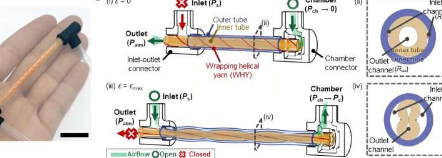
软阀利用管状结构内的气流进行操作。当拉力施加到管的一端时,内部螺旋缠绕的螺纹将其压缩,从而控制空气的流入和流出。这种类似手风琴的运动可以实现精确而灵活的运动,而无需依赖电力。
此外,研究团队证实,通过对管内不同的结构或螺纹数量进行编程,他们可以准确地控制气流变化。这种可编程性可以实现定制调整,以适应特定情况和要求,即使在管端施加一致的外力,也能提供驱动单元响应的灵活性。
“仅使用材料编程就可以轻松使用这些新开发的组件,从而消除电子设备,”Bae教授对这一发展感到兴奋。“这一突破将极大地促进各种可穿戴系统的进步。”
这种突破性的软阀门技术标志着朝着能够自主操作的全软、无电子机器人迈出了重要一步——这是增强众多行业安全性和适应性的重要里程碑。
版权说明:本站所有作品图文均由用户自行上传分享,仅供网友学习交流。若您的权利被侵害,请联系我们
相关文章:
- 2023-11-26研究表明南极臭氧层空洞在仲春时更深
- 2023-11-24机器人假肢脚踝改善自然运动和稳定性
- 2023-11-24球形机器人来救援
- 2023-11-24解释人工智能的方法可能并不那么容易解释
- 2023-11-24描述开放系统中量子信息加扰的通用框架
- 2023-11-24研究为抗生素耐药性和健身景观提供了新的见解
- 2023-11-24物理学家发现量子材料中奇异电荷传输的证据
- 2023-11-23一种高效去除水产养殖废水中磷酸盐的方法
- 2023-11-23研究人员在防止钒电池容量损失方面获得了有希望的结果
- 2023-11-23了解化学处理沙土的强度发展机制
- 站长推荐
- 栏目推荐
- 阅读排行
- 健康和教育密切相关新西兰需要将其更多地融入小学
- Steam现已全面支持DualShock和DualSense控制器无需购买新的Xbox控制器
- DistrictTaco希望扩大其在罗利地区的业务
- Humane的AiPin–您的新型可穿戴人工智能助手
- Microsoft365CopilotAI如何提高您的工作效率
- MicrosoftRadius云开源应用程序平台
- 生产目的FiskerPear具有透明A柱因为移动头部太困难
- 索尼Xperia5V马来西亚发布Snapdragon8Gen2SoC 8GBRAM 256GB储存空间起价RM4999
- Nissan的模块化PulsarSportbak集轿跑车 旅行车和皮卡于一体
- 新奥尔良烤肉店将在中央市场推出