网站首页生活常识 >正文
机器人能够巧妙地在独立和合作行为之间切换,从而高效地穿越人群,并且尽可能不打扰周围的人。这是TU 教授 Roderich Groß 在arXiv预印本服务器上发布的一项研究成果。
“无论是在工厂、医院还是灾区,机器人群体将越来越多地在人类环境中工作,”格罗斯解释道,他是慕尼黑工业大学计算机科学系弹性网络物理系统系主任。“尚未完全解决的一个问题是,它们如何安全有效地做到这一点,尤其是在人群密集的情况下。”
他的团队刚刚与谢菲尔德大学的研究人员在纽约分布式自主机器人系统会议( DARS 2024 )上展示了一项关于该主题的研究。
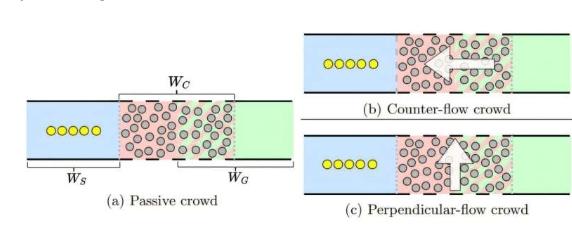
研究人员模拟了机器人群体遇到不同类型的人群的情况。在模拟中,人们要么站着不动,要么朝机器人走去,要么以直角穿过机器人的路径。此外,测试是在与机器人相同的空间中移动不同数量的人的情况下进行的。
测试了三种行为策略:独立策略,其中每个机器人独立穿过人群;合作策略,其中机器人排成一线并跟随前面的机器人;自适应策略,其中机器人根据情况自主在前两种策略之间切换。
多达 200 个机器人的模拟表明,采用合作策略穿过站立或靠近它们的人群时,它们造成的干扰较少,并且这种策略在密集人群中被证明更为有效。另一方面,当机器人附近只有少数人时,独立策略更胜一筹。
在人们与机器人成直角移动的情况下,独立策略在两个方面都更为成功。自适应策略结合了两种方法的优点,在所有场景中表现尤为出色,而且不会对人群产生太大影响。
该研究的第一作者 Jahir Argote Gerald 解释道:“这种合作策略被证明对于在人群中移动的机器人来说是有效的,同时还具有维持机器人之间通信网络的额外好处。”
“尽管如此,我们发现,在某些情况下,单独引导人群的机器人比合作引导人群的机器人表现更好,这促使我们创建了一种自适应策略,该策略在我们考虑的所有条件下都表现良好,并且不会对人群造成太大干扰。”
接下来,科学家们计划通过改进方法开发正式的安全保障,并在现实环境中验证结果。由于迄今为止的结果是基于模拟人群,因此需要进一步研究将这些方法转移到真实人群中的导航。
在这种情况下,机器人必须独立、实时地确定人们的位置。还必须确保即使个人的行为与人群中其他人的行为有很大差异,机器人也能安全运行。
版权说明:本站所有作品图文均由用户自行上传分享,仅供网友学习交流。若您的权利被侵害,请联系我们
相关文章:
- 2024-10-30多孔磁性软夹持器能够快速轻柔地抓取精细的生物物体
- 2024-10-30简化的章鱼启发式游泳机器人具有柔软的不对称手臂可以复制游泳模式
- 2024-10-30固体废物填埋场如何转变为令人担忧的高温填埋场
- 2024-10-30出于对吸盘鱼的热爱志愿者为主要淡水鱼的研究做出贡献
- 2024-10-30发现赋予多年生黑麦草耐热性的关键基因
- 2024-10-29成功开发完美抗磁性导电聚合物
- 2024-10-29可持续系统利用光合微生物进行环保型培养肉生产
- 2024-10-29进化权衡如何影响四足动物的精子长度
- 2024-10-29工程细菌蛋白可有效分离稀土金属
- 站长推荐
- 栏目推荐