网站首页生活常识 >正文
中国科学院中国科学技术大学李木军副教授、张世武教授和胡兵教授领导的研究团队开发出多孔磁性软夹钳(PMSG),可以轻柔快速地抓取精细的生物体。它们可以抓取各种物体,从细线到脆弱的生物体,在生物医学和科学研究中具有潜在的应用。该研究成果发表在《先进材料》上。
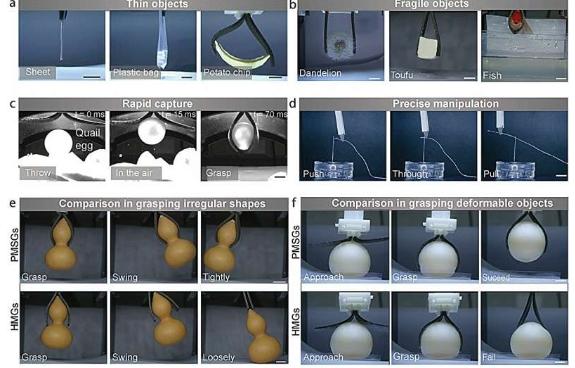
操纵生物物体需要能够适应不同形状并施加足够力量而不会造成伤害的夹持器。因此,软夹持器比传统的刚性夹持器更好,因为它们具有更大的灵活性。作为一种软夹持器,磁力驱动夹持器具有快速响应和无线控制等优势,但现有设计通常在形状适应性和有效载荷能力之间做出妥协。
为了解决这个问题,研究人员在磁性硅弹性体中引入了多孔结构。夹持器内的多孔结构提供了一种调整材料弹性模量的方法,使其更轻、更柔软、更灵活。多孔设计还提高了夹持器的变形能力,并提供了相当大的缓冲潜力,减少了对夹持物体的影响。
具体而言,传统的增加夹持器夹持力的方法是增加磁粉含量,但磁粉含量越高,夹持器就越硬,夹持能力就越差。
为了让夹爪兼具高夹持力与柔软度,研究人员提出在结构上“减法”,在磁性硅胶中制造孔隙,但要在高磁粉含量与大孔隙率之间取得平衡,是一项极具挑战性的任务。
在尝试了多种成孔方法后,团队最终选择了固体模板分解成孔法,即利用可分解的固体材料形成所需的孔隙。团队采用NH5CO3作为成孔剂,在加热过程中分解成气体,从而使磁粉含量较高的夹钳中形成了丰富的孔隙结构。
通过引入多孔结构替代部分硅胶,该团队不仅增加了夹持器的磁驱动力,还提高了夹持器的柔性包裹能力。这双重改进显著增强了夹持器抓取重物的能力,提供了比传统机械夹持器更可靠的抓取解决方案。
PMSG的开发代表了夹持器技术的重大进步。通过将多孔结构集成到磁性硅弹性体中,研究人员克服了形状适应性和有效载荷能力之间的权衡。夹持器能够轻柔快速地抓住精细的生物物体,在生物医学和科学领域具有潜在的应用,为操纵精细生物开辟了新的可能性。
版权说明:本站所有作品图文均由用户自行上传分享,仅供网友学习交流。若您的权利被侵害,请联系我们
相关文章:
- 2024-10-31这一发现挑战了现有的 Kagome 金属磁性理论
- 2024-10-30通过独立行为和合作行为的交替机器人可以在人群中找到自己的路
- 2024-10-30简化的章鱼启发式游泳机器人具有柔软的不对称手臂可以复制游泳模式
- 2024-10-30固体废物填埋场如何转变为令人担忧的高温填埋场
- 2024-10-30出于对吸盘鱼的热爱志愿者为主要淡水鱼的研究做出贡献
- 2024-10-30发现赋予多年生黑麦草耐热性的关键基因
- 2024-10-29成功开发完美抗磁性导电聚合物
- 2024-10-29可持续系统利用光合微生物进行环保型培养肉生产
- 2024-10-29进化权衡如何影响四足动物的精子长度
- 站长推荐
- 栏目推荐